maquette d'un tourelle balistique
Contexte
Dans le cadre de ce projet, nous avons conçu et réalisé une maquette de tourelle balistique à visée automatique. L'objectif était de détecter une cible prédéfinie grâce à la vision artificielle, d'orienter une plateforme motorisée (pan & tilt) vers cette cible, puis de déclencher le mécanisme de lancement d'un projectile. Le système devait fonctionner de manière autonome et fiable en combinant mécanique, électronique et algorithmie.
Objectifs
- Détecter et localiser une cible connue à l'aide d'une caméra et d'un algorithme de vision.
- Orienter précisément la plateforme pan & tilt pour assurer la visée sur l'axe horizontal et vertical.
- Concevoir un système de propulsion (ressort) et une commande qui permettent le lancement reproductible d'un projectile.
- Assurer la synchronisation entre détection, orientation et déclenchement pour un fonctionnement autonome.
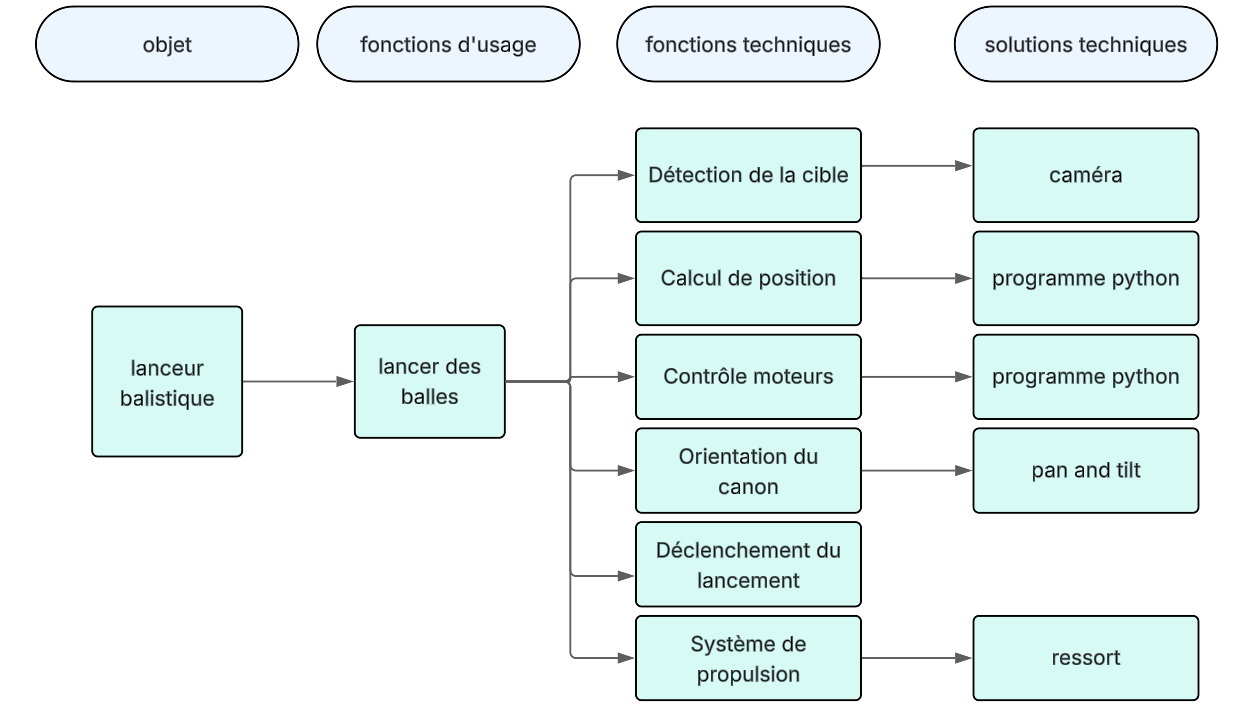
Architecture fonctionnelle
Le système s'articule autour de trois blocs principaux : la mécanique (plateforme et système de propulsion), l'électronique (carte de puissance, drivers moteurs, microcontrôleur) et la partie logicielle (acquisition vidéo, détection de la cible et contrôle des moteurs). Ci‑dessous, le diagramme fonctionnel du système.
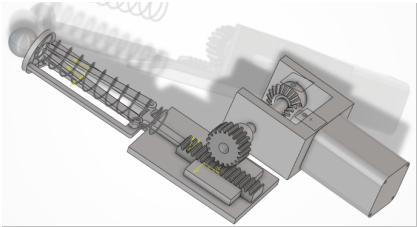
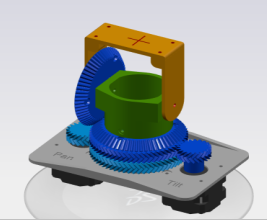
Conception mécanique
La plateforme Pan & Tilt a été dimensionnée pour offrir la précision et la robustesse nécessaires à la visée. Les assemblages privilégient la rigidité et la répétabilité des positions. Le mécanisme de propulsion utilise un système à ressort avec verrouillage mécanique, conçu pour un déclenchement contrôlé et sûr.
Électronique
La carte électronique intègre la gestion de la puissance pour les moteurs (drivers adaptés au couple requis), l'alimentation, et l'interface avec un microcontrôleur (Arduino) chargé de la commande temps réel. Les capteurs (fin de course, retour d'encodeur) et l'acquisition caméra sont câblés pour assurer sécurité et supervision.
Programmation et vision
La détection de la cible repose sur un traitement d'images (OpenCV) capable d'identifier l'objet connu et d'en estimer l'azimut et l'élévation. Un contrôleur pilote les moteurs en boucle fermée pour atteindre la position demandée ; la logique de supervision synchronise la détection, l'orientation et le tir. Des routines de filtrage et de validation évitent les déclenchements sur détections erronées.
Tests, résultats et perspectives
Lors des essais, nous avons évalué la précision angulaire, le temps de verrouillage de la cible et la répétabilité des lancers. Les résultats montrent une visée robuste pour des cibles statiques dans l'aire de travail définie. Pour la suite, des améliorations possibles : optimisation de l'algorithme de vision pour cibles en mouvement, réduction du temps de réaction, ajout d'encodeurs de haute résolution, et sécurisation accrue du mécanisme de propulsion.
Équipe : 2 étudiants — responsabilités partagées sur la mécanique, l'électronique et le développement logiciel. Documentation et rapport disponibles en téléchargement.
Galerie